About

We introduce Robot Autonomous Motion (RoAM), a unique video-action dataset that includes 50 long video sequences collected over 7 days at 14 different indoor spaces, capturing various indoor human activities from the ego-motion perspective of the Turtlebot3 robot. Along with the stereo image sequences, RoAM also contains time-stamped robot action sequences that are synchronised with the video data. The dataset primarily includes a range of human movements, such as walking, jogging, hand-waving, gestures, and sitting actions, which an indoor robot might encounter while navigating environments populated by people. Each of the 50 recorded video sequences, is started with unique initial conditions such that there is sufficient diversity and variations in the dataset. The dataset pre-dominantly records human walking motion while the robot slowly explores its surroundings.
RoAM Data
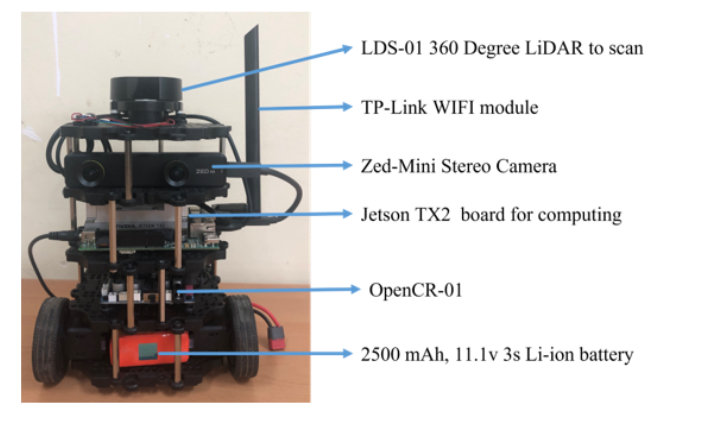
The RoAM dataset is collected using a custom-built Turtlebot3 Burger robot. We have used the Tensorflow Dataset API to generate 3,07,200 video-action sequences of length 25 for training our variational and diffusion models. It also contains the corresponding action values from the robot’s motion to capture the movement of the camera. We have used Zed mini stereo vision camera for capturing the left and right timestamped image pairs. Other than that the robot is equipped with an LDS-01 2-dimensional LiDAR, a TP-link WiFi communication module as shown in Figure above. The Turtlebot3 employs two DYNAMIXEL XL430-W250 servo motors for navigation, utilizing current-based torque control. These motors are actuated and controlled by the OpenCR-01 board, which is integrated into the platform. For our specific application, we have selected the Jetson TX2 board as the onboard computer, operating on the ROS Melodic framework and the Ubuntu 18.04 operating system. This setup offers the advantage of leveraging the Jetson TX2’s high computational power to support complex robotic tasks, such as perception, navigation, and machine learning.
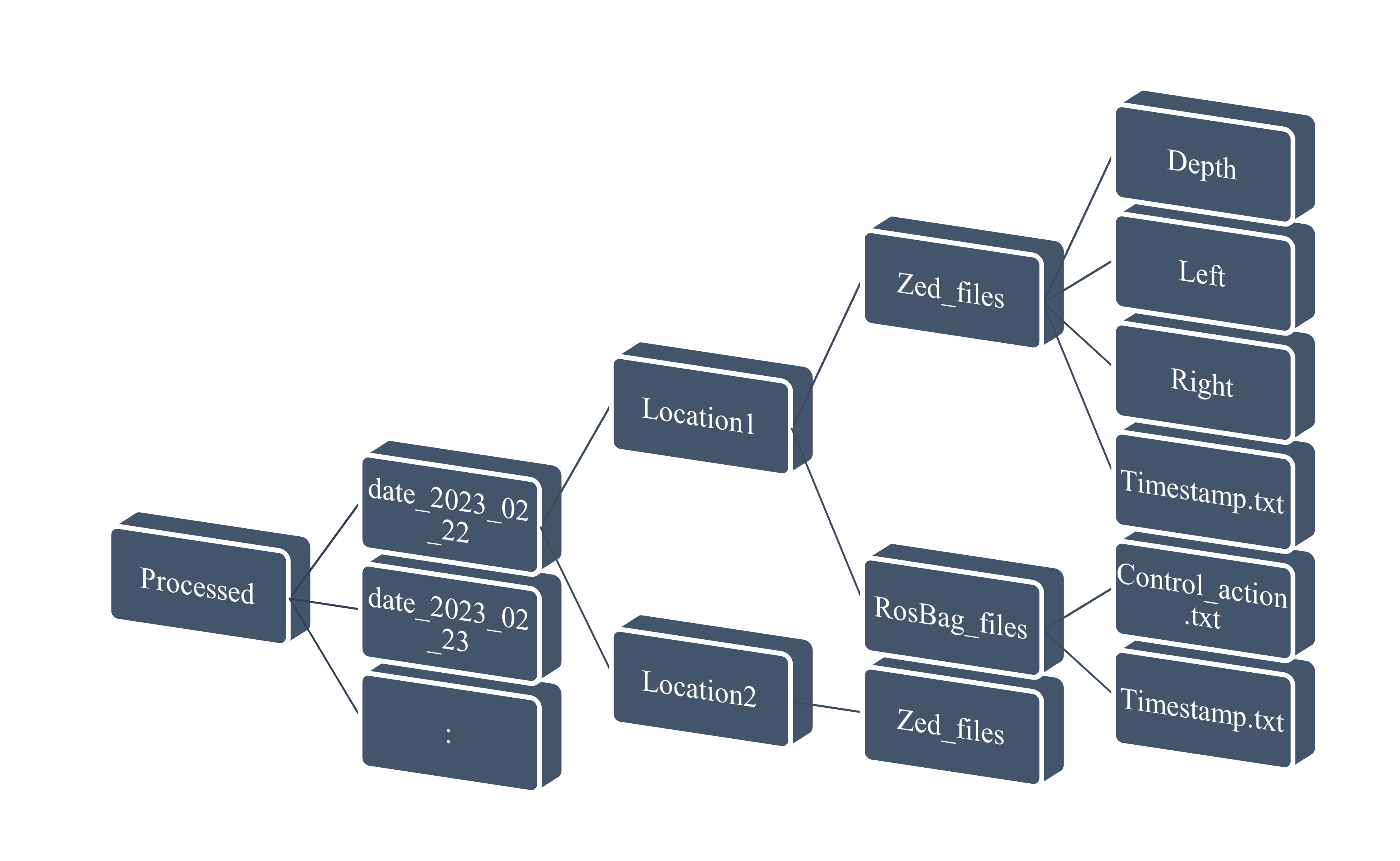 The processed data file structure of RoAM
The processed data file structure of RoAM
Samples



 Training Video Samples
Training Video Samples
Models








Ground Truth Vg-Leap Causal-Leap SVG
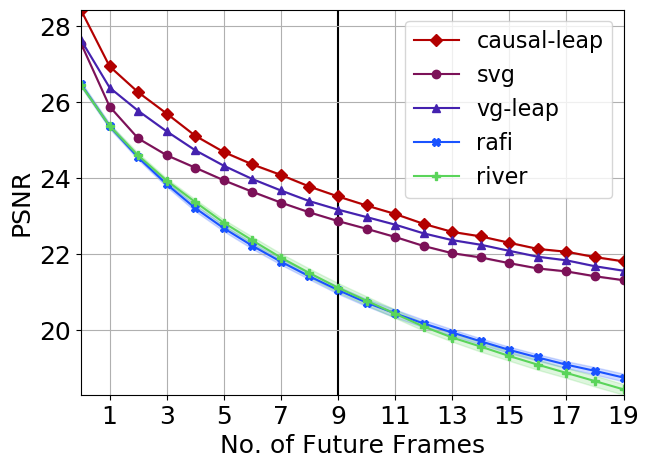
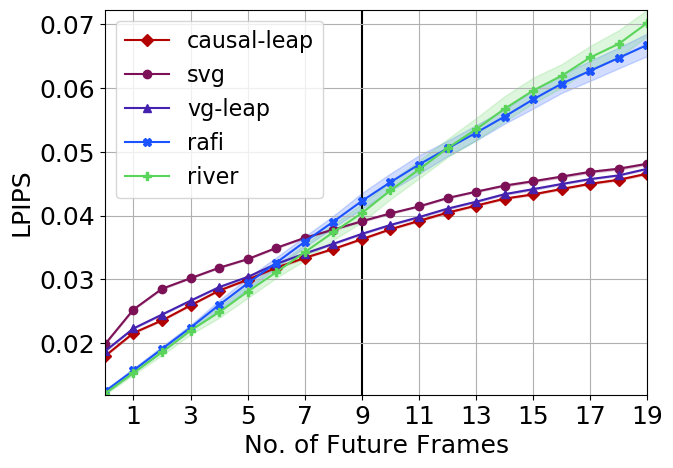
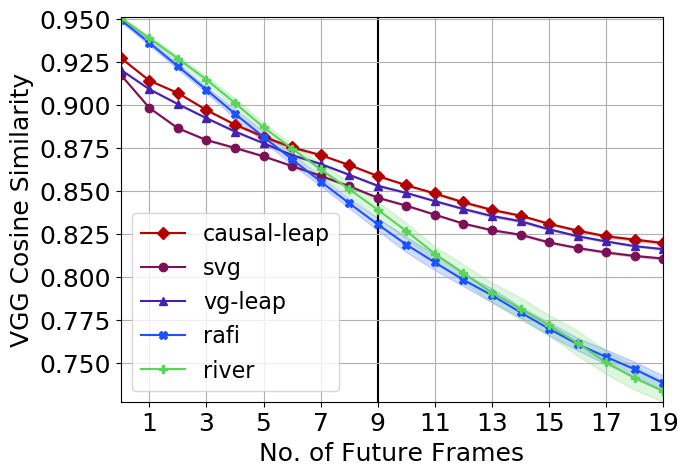
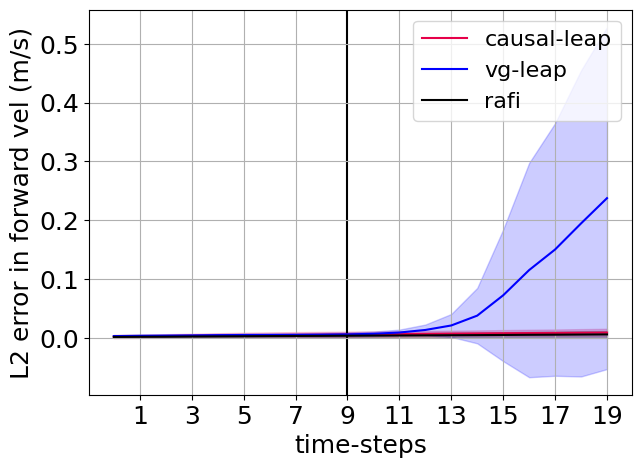
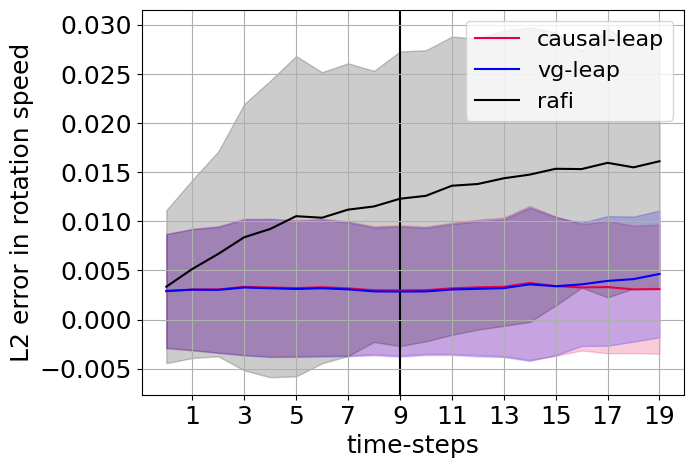
Results

Action Prediction
Link to Code for Creating TFrecord files:
RoAM Dataset Download
The initial version of the dataset is currently available in TFRecord file format. To download the dataset, please drop an email to meenakshisar@iisc.ac.in with the subject line Access to RoAM dataset along with your affiliation and purpose to use for the dataset.
Cite RoAM as:
@InProceedings{acpnet2023,
author={Sarkar, Meenakshi and Honkote, Vinayak and Das, Dibyendu and Ghose, Debasish},
booktitle={2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)},
title={Action-conditioned Deep Visual Prediction with RoAM, a new Indoor Human Motion Dataset for Autonomous Robots},
year={2023},
volume={},
number={},
pages={1115-1120},
doi={10.1109/RO-MAN57019.2023.10309423}
}